0. Pre-Plan
Estimate initial UAV hover point and relay count.
SkyMesh is a self-healing offline mesh that uses UAV relays to reconnect rescue teams across terrain, distance, and damaged infrastructure.
Read Full ProposalTerrain can split responders into disconnected mesh groups.
Reconnect field teams and restore push-to-talk voice using UAV relays in a secure offline mesh.
Show the system failing before the UAV relay, then recovering it.
Command, team nodes, and UAV relay operate in one offline network.
Decentralized routing algorithm (Babel) and 2.4 GHz Wi-Fi with fixed node roles.
Local Murmur + Mumble with no internet dependency.
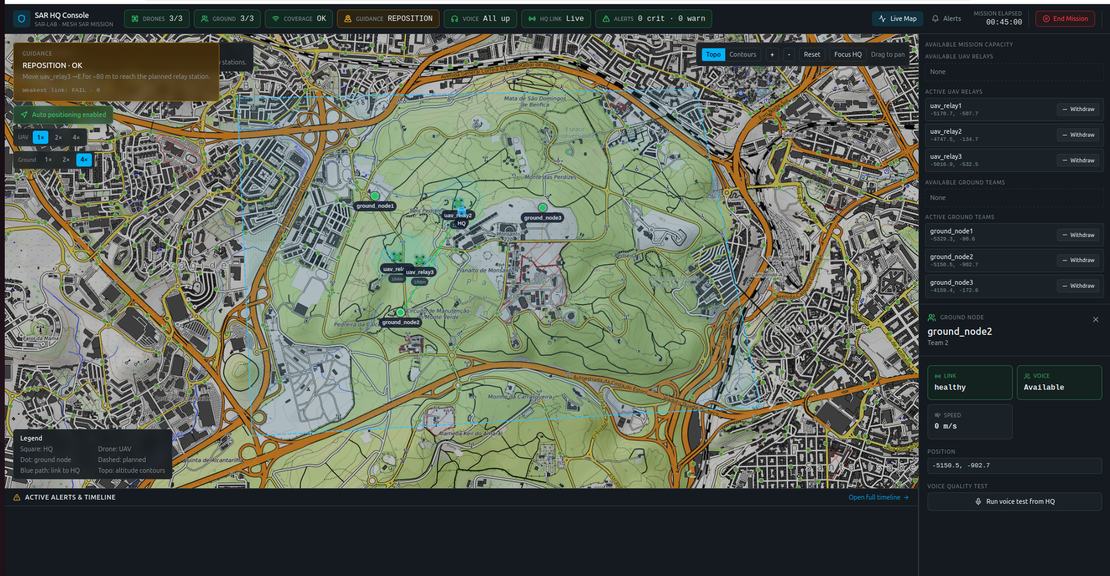
Geo Location, link quality, and network fails are tracked locally monitored in Command dashboard
Multi-agent reinforcement learning guides UAV relays to reconnect isolated teams.
Estimate initial UAV hover point and relay count.
Start command services and deploy ground nodes.
Confirm partition with route, ping, and PTT failure.
UAV relay joins mesh and begins autonomous monitoring.
Autonomous reposition restores route and cross-team PTT.
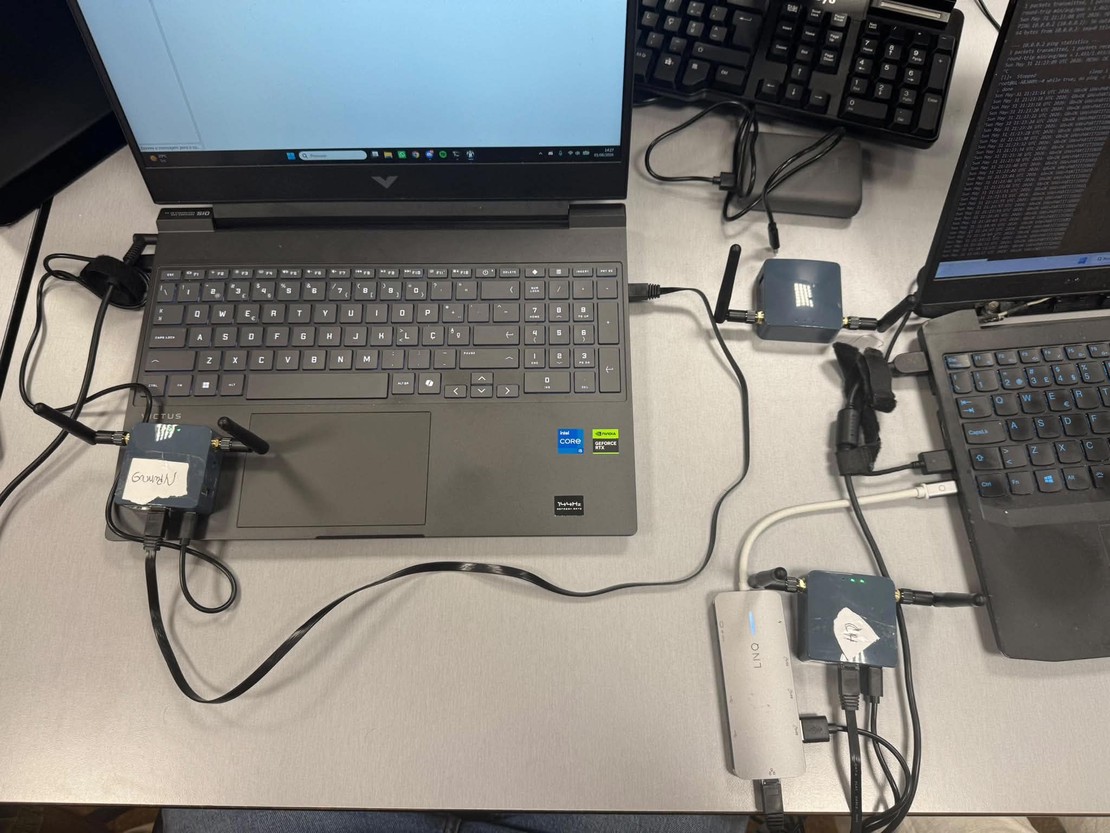
With the simulation fully validated, the focus shifted to the physical prototype. This week the hardware was assembled and wired up on the bench, and all tests were carried out on real radio links.
The end-to-end simulation of the aerial–ground search-and-rescue system is finished, and it validated the architecture we set out to prove.
Prototype development now has a clear target: a self-powered UAV relay payload, fast boot-to-mesh behavior, local voice and telemetry services, and enough instrumentation to measure recovery after a partition.
The final deck makes the positioning explicit: ElectroCap is an offline communications kit for institutional emergency operators, not a generic drone demo.
View PDFThe draft midterm presentation makes the architecture concrete: ground nodes form the offline mesh, the UAV relay is used only when the topology breaks, and the command node hosts voice, maps, and monitoring locally.
The bill of materials shows an intentionally simple first prototype: most of the budget goes into the mesh nodes themselves, not exotic hardware.
View PDFThe requirements document turns the concept into testable constraints: an offline Wi-Fi mesh with BATMAN-adv, local Push-To-Talk voice, and clear limits for the airborne relay.
View PDFStakeholder feedback pointed to one constraint early: rescue teams will not tolerate heavy or fiddly communications gear in the field.
On March 3, 2026, we submitted a proposal for an aerial-ground mesh that restores search-and-rescue communications when terrain splits the network.
